FIND研究员∶吴�@鸿 
光达感测技术应用日益普及
光达 (Lidar) 感测具有高精度、高准度及高辨识度的优点,因此在机器人及无人自驾车领域,已被广泛大量使用。在机器人领域,藉由光达辅助,可协助自主移动机器人(Autonomous Mobile Robot,AMR)完成环境建图(Mapping)、定位(Localization)、导航 (Navigation)、物件侦测 (Object Detection)、避障 (Obstacle Avoidance) 等功能,这些功能也是光达在机器人的主要应用。
光达可分为机械式 (mechanical)及固态式 (solid state) 二种,传统光达为机械式,使用机械结构旋转扫描,其具有造价高、体积大、速度慢等缺点。新一代固态光达 (Solid State Lidar) 使用全电子式器件完成光束转向(steering)及扫描(sweeping),具备体积小、速度快、准度高等优点。以光学相控阵 ( Optical Phased Array,OPA) 技术为基础所设计之固态光达,是光达技术发展的新趋势,本文将对 OPA-based 固态光达技术原理做一简单介绍。
OPA LiDAR是目前固态光达的设计主流
光探测和测距(Light Detection And Ranging, LiDAR)是一种使用雷射光(emitted laser light)来探测环境的一种技术,是依据光波在介质中传播遇到物体反射所需时间,即所谓飞行时间(Time of Flight, ToF),推算距离的方法。光讯号的发射可透过雷射二极体(laser diode)元件来完成,而光的侦测及接收可透过光电二极体(photo diode)。
传统光达扫描方式,多使用机械结构或微机电系统(MEMS)完成,因为是平面机械式旋转,出现在平面以上高度位置或以下位置的物体几乎无法侦到,因此机器人往往需在不同角度安装多个光达,否则会出现侦测盲点。但若使用的是固态光达,则三维空间扫描变得快速且容易,即使路径上方有突然凸起障碍物也能避开,并可支援悬崖预警探测,感知装卸货平台边缘以避免跌落边缘。
固态光达不需使用任何机械式零组件,雷射光束方向的改变(steering)靠电子控制完成,因为没有机械结构,所以不会有移动组件(moving parts)在受到撞击或振动时错位或磨损的问题。OPA LiDAR是目前固态光达的设计主流,也是未来光达设计主要方向。
OPA LiDAR的原理是透过大量相控光学天线单元(phase-controlled optical antenna elements)所发射光波之间的互相干涉 (interference),来达成光束(Light beam)转向(steering)功能,参考图一。
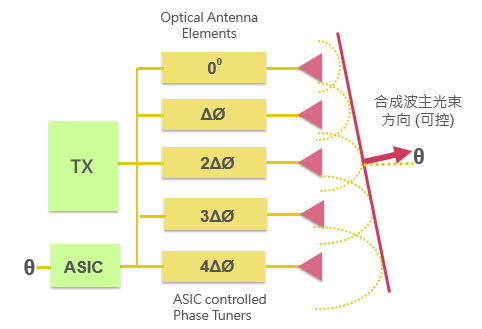
图1∶光学相控阵列技术原理
资料来源∶本研究自绘
「干涉转向」是OPA LiDAR运作的主要原理,给与发射阵列中每个单元不同的发射相位,再利用不同相位的光在干涉时,有的方向会互相增强,有的方向会互相抵销,合成波的射出方向即可改变,若经过计算,就能任意改变及控制合成波的发射角度,实现多维度空间扫描功能。
低成本、远距探测成为最大挑战
光波扫描的同时,会再透过光电二极体接收并处理扫描後的反射光束(reflected),量测光束来回的飞行时间(time of flight),接著计算每一个环境反射点的深度,据此建立出点云图(point cloud),最终完成机器人三维建图(3D-mapping)、导航及避障等应用功能。
2022年5月,OPA LIDAR领导厂商Quanergy,宣布了其100% CMOS based OPA LiDAR,已成功实现业界领先的250米的距离探测[1],当然这样的距离离市场需求还有加强空间,但其低成本及高可靠性的优势,使其未来发展仍被相当看好。如何将生产成本再降低,提供更远距离的空间探测范围,将是OPA LiDAR的最大挑战。
参考文献
[1]Quanergy Systems, Inc., (2022/May/10), Quanergy Delivers Industry-First 250 Meter Range for OPA-Based Solid State LiDAR。https://quanergy.com/pressrel/quanergy-delivers-industry-first-250-meter-range-for-opa-based-solid-state-lidar/-




沒有留言:
張貼留言